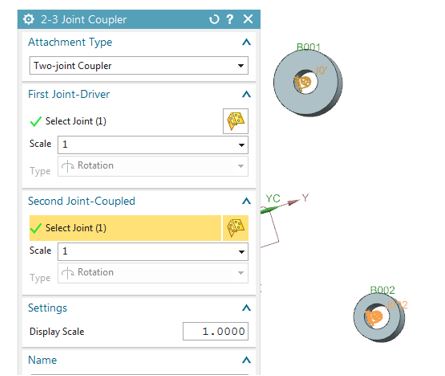
In Siemens nx motion, how to connect multiple revolute, slider, and cylindrical joints? 2-3 joint coupler command use to define the relative motion between two or three revolute, slider, and cylindrical joints. You can scale the motion of each joint relative to the other or use a negative value to reverse the direction of a […]
nx motion simulation
Create cable motion in Siemens nx

In Siemens nx motion simulation, cable motion defines the relative motion between two slider joints. If one slider moves, the connected slider also moves. With cable command, we can a 1 to -1 motion relationship of equal speed and direction or which one slider joint moves faster or slower. Where do I find it? Menu: […]
Siemens nx motion simulation create gear animation

In Siemens nx motion simulation, to create gear animation we will use gear coupler command. It uses to define the relative rotational motion between two joints. Where do I find it? Menu: Insert -> Coupler -> gear coupler. Home tab: Coupler group -> joint coupler drop-down -> gear coupler. How to create gear animation? As […]
nx motion create rack and Pinion animation
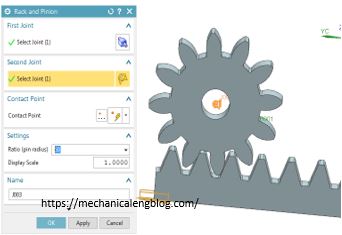
In Siemens nx motion simulation, A Rack and Pinion defines the relative motion between a slider joint and a revolute joint. You can use the rack and pinion couple to represent other types of mechanisms as Chain and sprocket, Timing belt and pulley, V-belt and sheave. You can select any slider joint and any resolute […]
create Siemens nx motion simulation animation

In this post I will guide how to create a Siemens nx motion simulation animation. To start a motion application, which provides tools to simulate and evaluate the large displacement complex motion of mechanical system. Where do I find it? From the menu: Application -> Simulation -> motion. Application tab: simulation group -> motion. How […]
Siemens nx motion joints
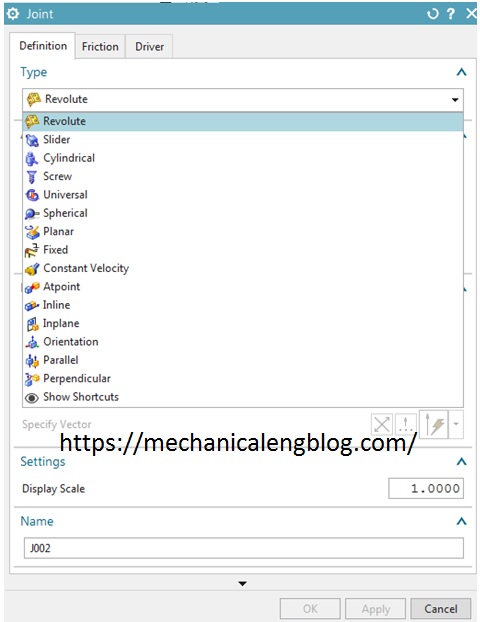
Nx motion joints use to define constrained motions between motion bodies in the mechanism. Joint motion is always defined as the motion of the action body (the first link in the joint definition, also called i marker) relative to the base body (the second link, or j marker).